首页
电池检测与化成
嵌入式软件
嵌入式硬件
储能
网站
分享
关于博主
您的位置:
首页
»
储能
»
正文
位置PID和增量PID
分类:
储能
作者:admin
浏览:213
2023年5月26日 14:06
1.位置PID
1.1 公式
e(k-1):上次误差
e(k):当前误差
∑e(i):误差累加和
2.增量PID
2.1公式
e(k-2):上上次误差
e(k-1):上次误差
e(k):当前误差
标签:
储能
上一篇:
光伏MPPT算法
下一篇:
光伏逆变器智能电表
您可能感兴趣的:
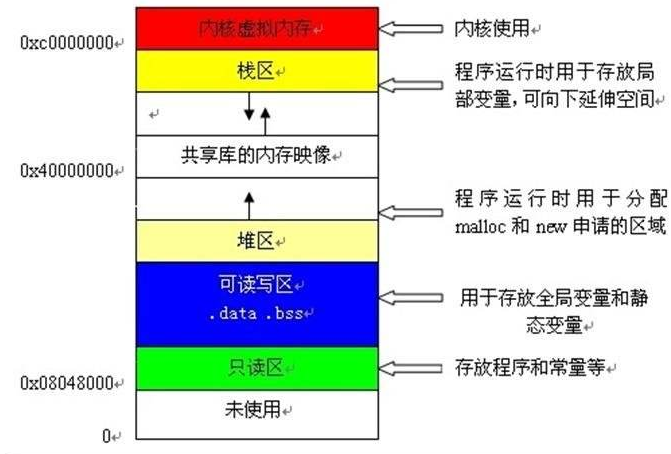
C++堆和栈的区别和联系
安卓APP开发
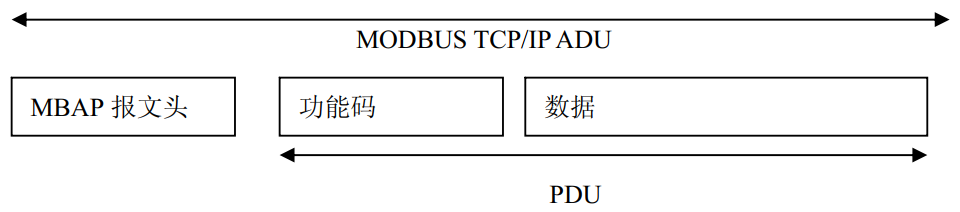
Modbus TCP
LWIP的KEEPALIVE研究
开关电源的纹波与噪声
Source Insight使用教程
前后端技术栈
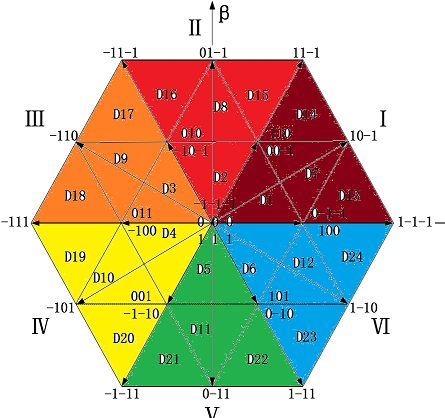
三相并网逆变器控制
项目部署
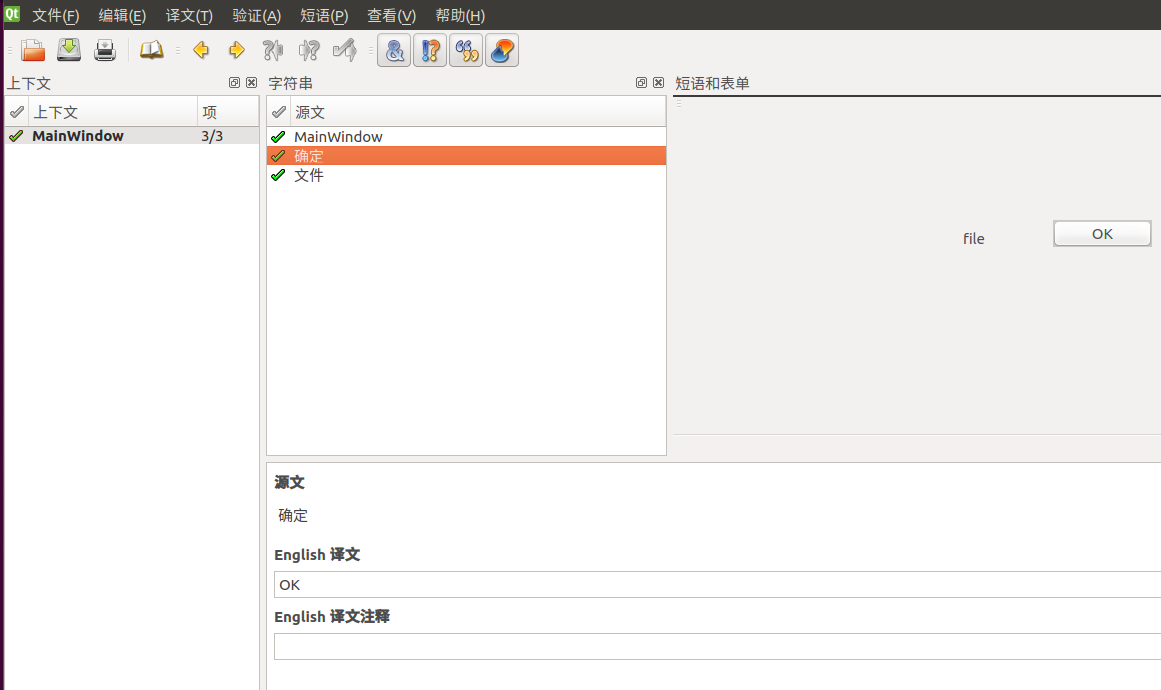
QT中英文切换